
Page 67 -
P. 67
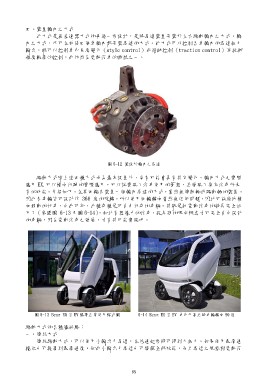
四、裝置輪內之方式
此方式是無差速器方式的再進一步設計,是將馬達裝置安裝於左右驅動輪內之方式。輪
內之方式,亦可在前後四個車輪內都安裝馬達的方式。此方式可以控制各車輪內的馬達扭力
輸出,就可以控制車身角度變化(style control)或循跡控制(traction control)等技術
程度較高的控制,此仍然為電動汽車的特性之一。
圖 6-12 裝設於輪內之馬達
驅動方式除上述四種方式成為基本設置外,尚有可能會再有其它變化。輪內方式之實際
應用 EX.可以橫向行駛的實際應用,可以說實現了汽車使用的夢想,並發現了原來汽車所未
有的功能。介紹如下。在其四輪各裝置一個輪內馬達的方式,當然無傳動軸或驅動軸的裝置。
因此各車輪皆可設計作 360 度的旋轉。所以使用四輪轉向當然無任何問題,因此可做原地橫
向移動的行車,由此可知,此種車種是可自由行車的車輛。其就是把電動汽車的特長完全活
用了(參閱圖 6-13 及圖 6-14)。如此有想像力的汽車,從早期的既成概念才可完全自由設計
的車輛,因為電動汽車之發展,才有其可能實現吧。
圖 6-13 Benz EO 2 EV 標準正常使用模式圖 6-14 Benz EO 2 EV 車身升高並將車輪轉向 90 度
驅動方式的各種優缺點:
一、傳統方式
傳統驅動方式,可以使用小輸出力馬達,在低速起步時可得到大扭力。如果使用最高速
檔位也可提高到最高速度。如此小輸出力馬達也可發揮全部效能,而且馬達之規格對電動汽
65
